
Now I have mounted the linear actuator on the slide, and have a working Y axis for my CNC engraver.
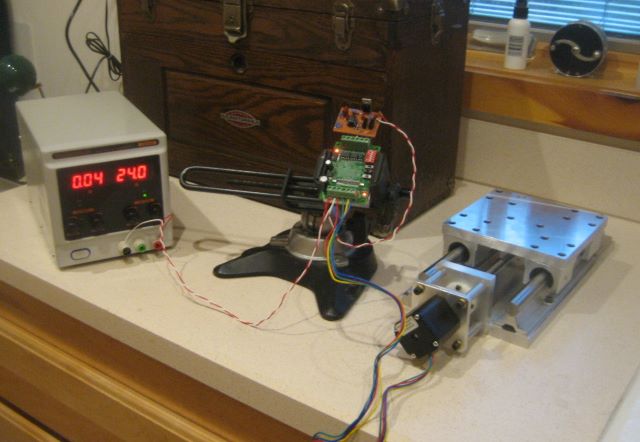
Driving the motor here is a board based on the Toshiba TB6560 IC. Like any stepper driver, it requires logic signals for enable and direction, and a pulse train to set the rate of stepping. To test the driver/motor combination, I made an oscillator circuit from a 555 timer. This oscillator runs at 400 Hz, so the slide travels at
400 steps/sec * rev/(200 steps) * 0.0833 inch/rev = 0.166 inch/sec
The stepper motor is rated 42 in-oz driving (76 in-oz holding) at 1.5 amp current. I found that 1.0 amp current is enough to smoothly move the slide. At 0.8 amp there are audible failed steps. Obviously there is binding due to imperfect alignment of the drive train, and this causes motor loads in excess of the ideal case. I have played around with the alignment, and do not expect to make much improvement. Fortunately, the loads that I am seeing are within the capability of the NEMA 17 stepper. My plan is to run the steppers open loop, but I can easily see the advantage of closed loop.
The next step is to set up a life test for the acme nut and the thrust bearing. If this is satisfactory, I will get material to make the rest of the machine.
